I am currently a PhD candidate at KIT, advised by Prof. Christoph Stiller. My research focuses on end-to-end autonomous driving. Previously, I completed my master's studies in autonomous driving at University of Stuttgart, where I conducted research projects and the master's thesis at Bosch Research on end-to-end perception and prediction.
Selected Publications
KITScenes
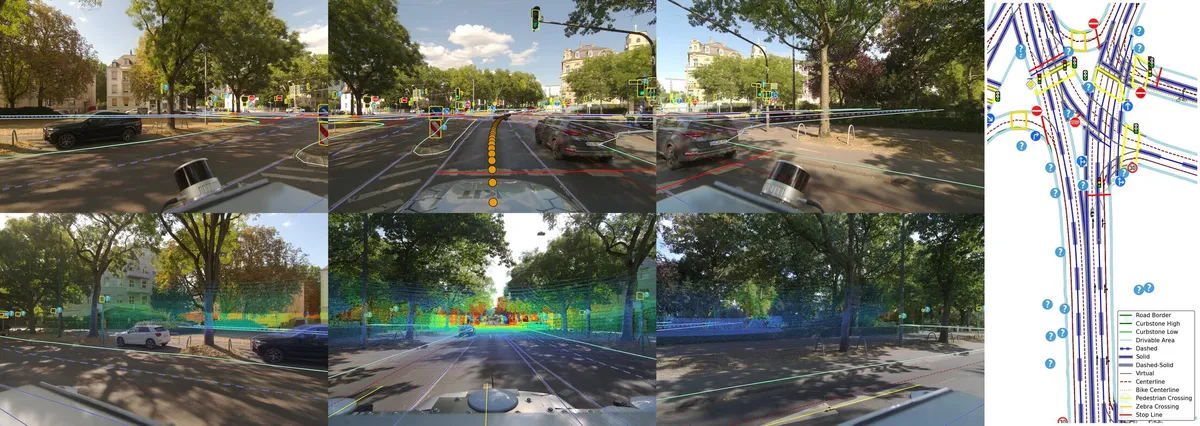
The Road Ahead in Autonomous Driving: The KITScenes Multimodal Dataset
Existing autonomous driving datasets have enabled major progress, but fall short in sensor fidelity,
map completeness, or geographic diversity. We present KITScenes Multimodal, a European dataset built
around high-fidelity sensors and maps. Its synchronized sensor suite combines high-resolution
global-shutter cameras, long-range lidar, 4D imaging radar, and redundant GNSS/INS localization. The
dataset includes comprehensive HD maps and four benchmarks for online HD map construction, long-range
depth estimation, novel view synthesis, and end-to-end driving.

LongTail Driving Scenarios with Reasoning Traces: The KITScenes LongTail Dataset
In real-world domains such as self-driving, generalization to rare scenarios remains
a fundamental challenge. To address this, we introduce a new dataset designed for
end-to-end driving that focuses on long-tail driving events. We provide multi-view
video data, trajectories, high-level instructions, and detailed reasoning traces,
facilitating in-context learning and few-shot generalization. The resulting benchmark
for multimodal models, such as VLMs and VLAs, goes beyond safety and comfort metrics
by evaluating instruction following and semantic coherence between model outputs.
The multilingual reasoning traces in English, Spanish, and Chinese are from domain
experts with diverse cultural backgrounds.
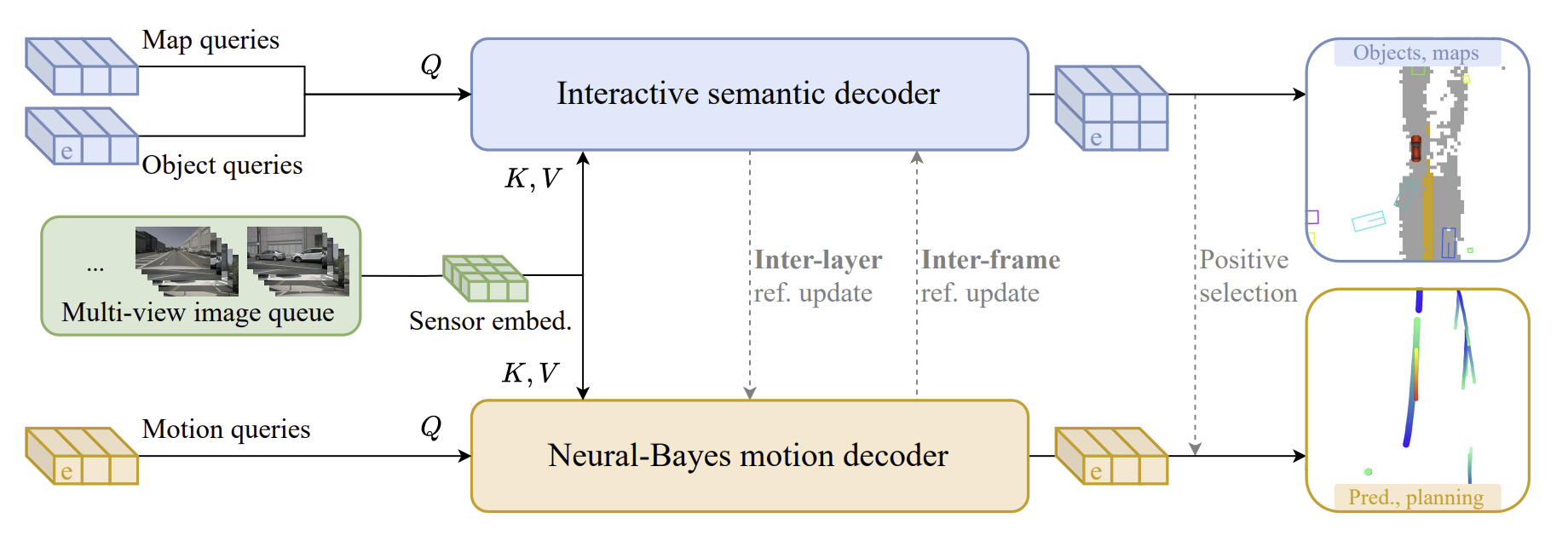
Divide and Merge: Motion and Semantic Learning in End-to-End Autonomous Driving
Perceiving the environment and its changes over time corresponds to two fundamental yet
heterogeneous types of information: semantics and motion. Previous end-to-end autonomous
driving works represent both types of information in a single feature vector. However,
including motion related tasks, such as prediction and planning, impairs detection and
tracking performance, a phenomenon known as negative transfer in multi-task learning.
To address this issue, we propose Neural-Bayes motion decoding, a novel parallel
detection, tracking, and prediction method that separates semantic and motion learning.
Experiments on the nuScenes dataset with UniAD and SparseDrive confirm the effectiveness
of our divide and merge approach, resulting in performance improvements across perception,
prediction, and planning.